Image public

In the process of drilling a borehole, geosteering is the act of adjusting the borehole position (inclination and azimuth angles) in real time to reach one or more geological targets. Conventional methods of geosteering use a large amount of data, typically 2D and 3D seismic data, geological models, borehole images and/or Logging While Drilling (LWD). In exploration wells, this kind of data are often scarce or missing, sometimes only log measurements like GR are available from offset boreholes.
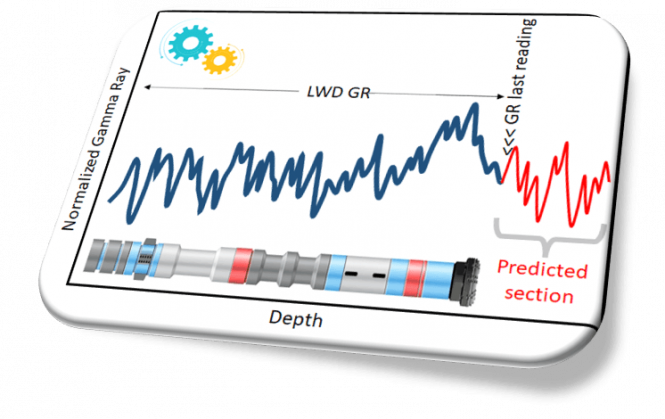
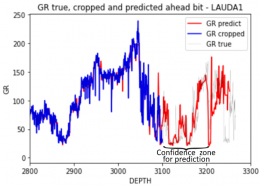
The project is placed well upstream of the geosteering techniques. It aims to predict during well drilling the log response to GR in front of the drill bit, typically at distances of several decametres in front of the drill bit. The ultimate goal is to identify in advance major changes in the lithology (for example the entry from the caprock to the reservoir) in order to reduce the drilling risks and related costs and improving well trajectory.
Our approach uses a combination of Machine Learning in Regression (for predicting GR response in a target well given the GR response in learning wells) and Dynamic Time Warping (for putting in depth correspondence similar stratigraphic events in different wells).
We carried out a proof of concept on a real data set from offshore Western Australia, with 3 wells (1 target well and 2 learning wells). The maximum distance for reliable prediction is of the order of 100m. Because the advancement time of the drilling tool over such distance (typically > 6 hours) is much larger than computation time (typically a few minutes) the prediction is done in near real time.
The early results are promising and pave the way for further adaptation. Although our proposed method has been initially intended for Gamma-ray (GR) logging, it can be immediately adaptable to any other available logging measurement (by following exactly the same protocol).
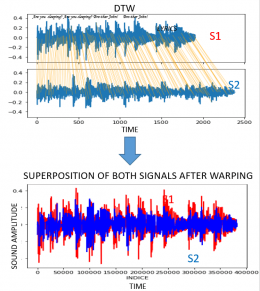
A simple acoustic analogy to get a practical idea of DTW. Consider two singers, one quite good (S1) and the other quite mediocre (S2) (out of tune, rhythm & tempo). The DTW will not only “quantify” in a precise way the difference between these recordings, but above all will automatically put in temporal correspondence the homologous events observed in these two recordings.
The maximum distance for reliable prediction is of the order of 100m. Because the advancement time of the drilling tool over such distance (typically > 6 hours) is much larger than the computation time (typically a few minutes) the prediction is done in near real time.

Check out all benefits of TELLUS Share membership
Digital transformation
towards geosciences 4.0